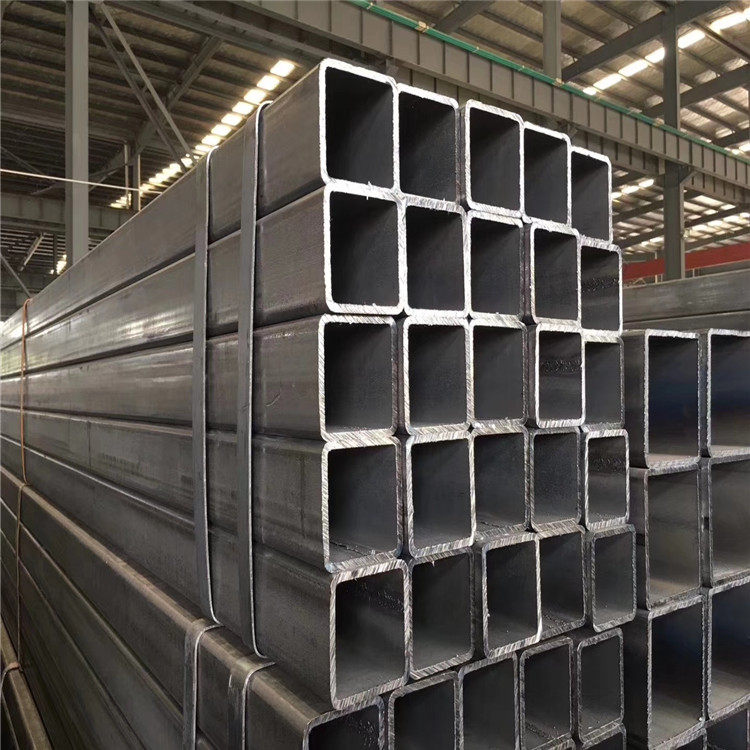
350*150*8方管 咸宁Q355E方管 门窗装饰

因此在暗埋或嵌墙场合,焊接(氩弧焊)式是不锈钢水管的连接方式。承插焊式管件具有如下优点:它吸收了卡凸式、卡压式等机械连接有承口插入的简便优点;避免了不锈钢和橡胶圈不同寿命(后者会过早失效)y的棘手问题;承插焊管件连接比对接焊简捷的多;与承插焊管件匹配的管子其管壁相对较薄,符合节材节能的国策,性价比更好。施焊过程无需焊丝(以延伸边代替),不仅能使管路材质浑然一体、成色1%,且能省却焊接辅料,提高焊接速度,确保焊接质量;属通称“无接头连接”的连接方式;经耐压、气密、拉拔和负压等试验,其各项数据表明,管件连接强度和密封性能等,较机械连接方式具有明显的优势;适用范围广,除明装、暗敷外,在管道井、嵌墙等复杂场合,“无接头连接”更具有特殊优势。围本标准规定了公称压力PN为1.2.4.MPa和公称压力PN为5.、11.、15.、26.MPa的榫槽面带颈平焊钢制管法兰的型式和尺寸。本标准适用于公称压力PN1.6~PN26.MPa的榫槽面带颈平焊钢制管法兰。用标准下列标准所包含的条文,通过在本标准中引用而构成为本标准的条文。本标准出版时,所示版本均为有效。所有标准都会被修订,使用本标准的各方应探讨使用下列标准版本的可能性。

无锡征图钢业有限公司
热轧精密钢管用连铸圆管坯板坯或初轧板坯作原料,经步进式加热炉加热,高压水除鳞后进入粗轧机,粗轧料经切头、尾、再进入精轧机,实施计算机 控制轧制,终轧后即经过层流冷却和卷取机卷取、成为直发卷。直发卷的头、尾往往呈舌状及鱼尾状,厚度、 宽度精度较差,边部常存在浪形、折边、塔形等缺陷。其卷重较重、钢卷内径为760mm。将直发卷经切头、 切尾、切边及多道次的矫直、平整等精整线后,再切板或重卷,即成为:热轧钢板、平整热轧钢卷、纵切带等产品。热轧精整卷若经酸洗去除氧化皮并涂油后即 成热轧酸洗板卷。(1)合理选材。对精密复杂模具应选择材质好的微变形模具钢(如空淬钢),对碳化物偏析严重的模具钢应进行合理锻造并进行调质热,对较大和无法锻造模具钢可进行固溶双细化热。
350*150*8方管 咸宁Q355E方管 门窗装饰
我国是世界上赤铁矿分布 广、储量、品位的 之一,赤铁矿在我国的铁矿资源中占有相当大的比例。赤铁矿与磁铁矿相比,嵌布粒度细,含泥量高,选矿难度较大。长期以来,国内对复杂难选赤铁矿的选矿试验研究一直没有间断过。经过几代选矿工作者锲而不舍的努力,我国赤铁矿选矿技术取得了长足的发展,逐步形成了具有我国特色的赤铁矿选矿工艺。目前,赤铁矿 常用的典型选矿工艺流程有阶段磨矿或连续磨矿、粗细分选、重选-弱磁选-高梯度磁选-阴离子反浮选工艺,连续磨矿、弱磁选-强磁选-阴离子反浮选工艺,焙烧、阶段磨矿-磁选-阳离子反浮选工艺等。
方管分为直缝焊方管和无缝方管两种 0mm。壁厚0.5mm-25mm长度:5m-12 厚0.5mm-25mm长度:5m-12.5m方管 5。S355etc产品包装:喷漆。涂油。打包。
(2)模具结构设计要合理,厚薄不要太悬殊,形状要对称,对于变形较大模具要掌握变形规律,预留余量,对于大型、精密复杂模具可采用组合结构。
(3)精密复杂模具要进行预先热,消除机械过程中产生的残余应力。
(4)合理选择加热温度,控制加热速度,对于精密复杂模具可采取缓慢加热、预热和其他均衡加热的方法来减少模具热变形。
(5)在保证模具硬度的前提下,尽量采用预冷、分级冷却淬火或温淬火工艺。
(6)对精密复杂模具,在条件许可的情况下,尽量采用真空加热淬火和淬火后的深冷。
(7)对一些精密复杂的模具可采用预先热、时效热、调质氮化热来控制模具的精度。
(8)在修补模具砂眼、气孔、磨损等缺陷时,选用冷焊机等热影响小的修复设备以避免修补过程中变形的产生。
另外,正确的热工艺操作(如堵孔、绑孔、机械固定、适宜的加热方法、正确选择模具的冷却方向和在冷却介质中的运动方向等)和合理的回火热工艺也是减少精密复杂模具变形的有效措施。
CCT曲线的绘制试样钢种为WLX82A,轧 成品断面尺寸为.5mm。于粗轧机出口摆剪处剪下一段粗轧坯试样,为中8mm15mm的圆柱体。将试样加热至1100℃,保温5min后冷却至1050CC,以50/s应变速率、60%相对变形程度进行压缩变形。根据现场的生产工 40℃/s7种不同的冷却速度进行冷却至200℃,测得温度.膨胀量时间曲线,用热膨胀法确定相变温度和时间,利用Origin软件绘制动态CCT曲线。
这三个阶段对应阀流量从大到小,刚始时以较大的组合流量以得到快速响应,随着偏差减少,阀流量逐步降低,到位置后保持输出流量为零。单独使用一种控制算法难以实现系统高速、高精度的控制要求,因此采用了三种控制方法相结合,分别对应系统响应的三个阶段实施控制。 设计的控制器控制算法如下:位移误差|e|ε1时,Bang—Bang控制;位移误差ε1|e|ε2时,PID控制;位移误差|e|≤ε2时,模糊控制。